


撮影ボートの必要な要件として旋回性能が高いと言うこと、多少の風や波でも安定する事というのが前提になります。大きければ大きいほど安定しますが、重量やそれを動かすパワーというのも必要になります。撮影する走行モデルより速く走行できなければ追走できません。しかも一人で入水や離水をすることも考え、なるべく大型で、なるべく軽量で、しかも車に積むために組み立て式に出来ると言うことを考慮するとデザインや材質の選択肢は自ずと決まってきます。
そこで考えたのが塩ビ管工作です。これは水中ロボコンの高校生競技用のメカフレームが塩ビ管で作られているのを見て思いつきました。安価で丈夫、しかも加工しやすい、さらに豊富なパーツで形状の変更も可能。まさにうってつけな素材と言えるでしょう。もう耐候性云々という次元ではありません。塩ビ管バンザイです。全体パーツが塩ビ管とアルミ板とステンレスネジ/ナットですから錆びに強い材質で組み上がっているので耐候性は十分です。
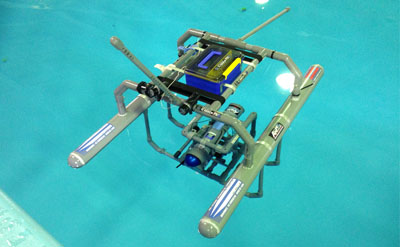
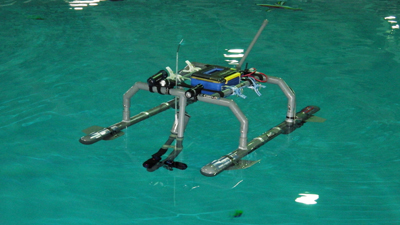
前後左右方向の揺れを考慮するとほぼ真四角の船体形状が好ましいと思います。カタマラン方式の双胴フロートで潜水中の水中モデルの真上にいてもじゃまになりにくいようにメカ部分はフロートに対してブリッジになる形状にしました。推進は左右のスラスタを使用して旋回力を向上させています。
さらに水中部分にも逆ブリッジ形状の脱着可能なケージを付けられるので、大型水中カメラの取り付けや水中モデルの通り抜けシーンなど、様々な撮影が可能になるオプショナルパーツも作りました。場合によってはこの部分に水中モデルを固定して撮影と言うことも可能になっています。

メインメカボックスは釣り用の防水ボックス。
防水ボックスを探しましたがどれも値段が高く、しかもごつくて重量がある物ばかり。水上に設置する物で重いバッテリーも搭載することを考えると、重いケースはトップヘビーとなりあまり好ましくありません。しかも、防水と言っても水中で使用するわけではないので、水がかかっても大丈夫という程度の物で良いのです。探しまくったあげく見つけたのは釣具屋さん。何を入れるボックスかは知りませんが、とにかく安くて軽量、しかも防水といううってつけの物を見つけました。アルミステーで取り付けていますが前後に移動して船体の重心位置を変えることが出来るようにしてあります。
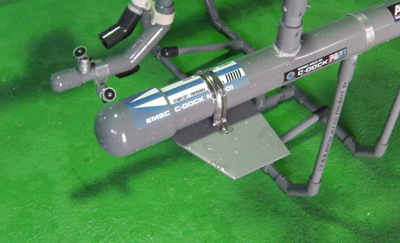
パワーユニットは平尾モデル製の特注品
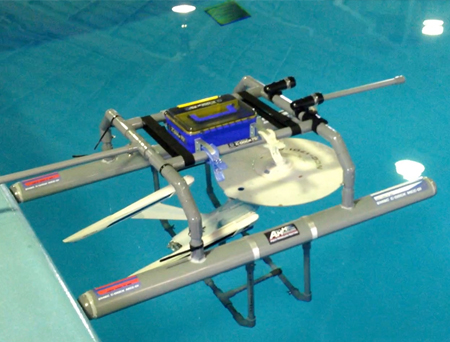
1mを超えるサイズのフロートを使った船体は1100cm×75cmという大型になりましたが、これはホビーサイズでは最大級の大きさです。この大きさを動かすにはそれなりのパワーがあるスラスタが必要になります。そこで、水中モデルの巨匠の平尾モデルさんにお願いしてスラスタを作ってもらいました。撮影用ボートなので速度より力が要求されます。加速や急な操作に追従してパワーが出せ、しかもなるべく撮影や走行のじゃまにならない物という無茶な条件でしたが、要求通りの性能のスラスタを作ってもらえました。平尾モデルさんさすがです。

3方向同時撮影可能なエレファントノーズ。
カメラステーはテストによりかなり強度が必要になることがわかったため、当初の13mm径のパイプから本体フレームの20mmパイプへ変更し、水圧がかかってもブレないようにしました。そして、前と左右の3方向に同時にカメラを付けて撮影でき、追走中でも回りの景色を撮影することや撮影艦の横に平行して並び、今まで撮影しにくかった併走撮影も可能にします。カメラステーが象の鼻のように伸びているのでエレファントノーズと名付けました。使わないときには跳ね上げて水から出して抵抗を減らせます。 (2014年12月追加)
波を突き抜ける水平安定翼。
1m以上のサイズがあるフロートでも海の波とうねりには翻弄されてしまいます。そこで、フロートに水平安定翼を追加しました。フロートだけだとどうしても波に揺られてしまうのですが、水平安定翼の追加で波やうねりにも揺れにくくなりました。さすがに完全には押さえることは出来ませんが、追加前より船体の揺れが減少し、カメラの揺れが少なくなりました。波のないプールでは役に立ちませんが、海や湖などの波には多少の安定化する効果が得られます。フロートの4隅に取り付けました。 (2015年1月追加)
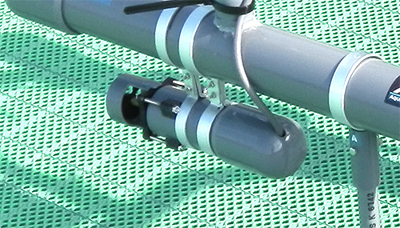
ワイヤレス伝送カメラ。(水中確認用)
KYOSHOのWiFiレシーバーのiReceiverを使用してカメラ伝送ユニットを作りました。受信距離が20m程度と適度なレンジがあり、アンドロイドタブレットやiPhone,iPadなどで受信できるのでリアルタイムに水中の状態を確認しながら撮影できるようになっています。エレファントノーズに固定した黒いパイプ部分にカメラが搭載され、上部の径が太くなっているところにレシーバーと駆動用のバッテリーが入っています。(2015年2月追加)
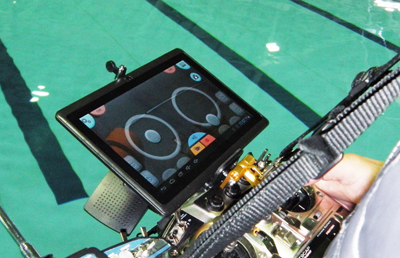
モニタリング用タブレット付きプロポ。
カメラ伝送の受信はプロポに搭載するアンドロイドタブやiPhoneで行います。操縦しながらでも確認しやすいようにプロポにアタッチメントを付けて搭載できるようにしています。伝送に若干のタイムラグと駒落ちがあるため、モニターでの操縦は出来ませんが、水中の状況は把握することが出来るようになりました。アタッチメントは市販品を加工してプロポに装着しています。ireceiverの操作部は今は使用していませんが、今後はカメラの方向移動などにも使うことになるかも知れません。(2015年2月追加)
進化する多機能モデル。
C-Dockは進化するモデルです。思いついたことをどんどん取り入れて改良を重ねていきます。進地旋回出来る操縦性によって様々な撮影に対応できるほか、トラブルで水上に停止したモデルのレスキュー(回収)等もこなします。まさにマルチパーパスタイプの水上水中撮影メカとなりました。通常の撮影時にはアンダーブリッジは使用しませんので、被写体への機動性の高い追従が可能になります。また、空撮のような水中カメラジンバルや、水平安定版の自動ピッチングコントロールなど、今後検討していくことになるでしょう。
閑話休題、
なんと言うことでしょう、
エンタープライズがぴったり収まります。
最初から考えて狙った訳ではなく、見ていたら何となく入るかなと思い、やってみました。この時はスラスタを付けていないので本当に浮きドックになっていました。
ここから発進してまたここに戻るという遊びをしてみましたが、これはこれで楽しい!。
C-DOCKはcamera docking carrier カメラを搭載して運ぶと言う意味から名付けました。撮影に特化したメカなのです。
その形状からdocking carrier ではなくDockでもいいかと思いますし、YDDockのC-DOCKで語呂がいいというのもあります。
SFYDD水物外伝
プールと海での走行テスト。
プールでは当然安定しています。さざ波程度なら全く問題無いでしょう。海の場合は大きな波には揺られますが、小さな波はフロートで打ち消しています。
ただ、やはり海の波の動きの力は大きいです。操縦していてもその感覚が伝わってきます。プールとは異次元の感覚です。ゆっくり動いているように見えますがモデルのスケール速度を考えるとこれでも速いくらいです。
C-DOCKによる水中モデル撮影。
通常のボートでは撮影できない安定性とフロートタイプ、ツインスラスタによる高機動性は様々な撮影を可能にしています。
エンタープライズでは追従した撮影を、ヤマトではカメラパンを旋回で行っています。また、アームによる前後の撮影やフロート先端や後端へのカメラ搭載など、様々な撮影を可能にしています。
船体下のアンダーブリッジは何をする物かというと、機能的には3つあります。
一つ目は多方向カメラステーとなります。前後左右真下など、カメラを環境や撮影物に合わせた位置に換えて配置することが出来ます。
二つ目は重りを少し追加してより安定を図る機能もあります。低重心になることで波の揺れにさらに強くなりフロートの半潜水状態を維持することが出来ます。これは上部メカケースのバッテリーの重さを相殺して低重心にし、より揺れにくくする効果が出ます。
そして三つ目の機能はモデル固定機能です。水中モデルのラジコン操縦が難しい、または不可能な場所で走行シーンを撮影したりするのにアンダーブリッジにモデルを固定することで疑似走行シーンを撮影することが出来ます。特に海などの電波が届かない場所での使用を想定しています。これにより、特撮機として様々な用途に活躍します。これならエンタープライズまで搭載可能です。
水上撮影や水中の風景だけの撮影ならアンダーブリッジを外してエレファントノーズを使い撮影することが出来ます。当然ながら抵抗がなくなる分、速度も上がり機動性も上がります。通常の追従撮影や併走撮影にはこの上部船体のみで行い、速度より安定を求めるときにはアンダーブリッジ付きで撮影するという多機能撮影特殊機器となっています。現在の稼働撮影時間は7.2vバッテリー2本で約15分(相当安全を見ています)程度で、25分ぐらいが走行限界です。2本ずつ並列で4本のバッテリーを搭載すると約30分の連続撮影が可能となります。
基本的に一回の撮影でこの時間があれば十分でしょう。バッテリー交換自体は30秒もかかりませんから、どんどん交換すればよいことです。
テスト中に気が付いたことですが、単純に水の中を撮影すると言う目的でも使えます。(あたりまえですが・・・(´Д`;))
いつも見ている海や湖の水中ってどうなっているの???という興味がかき立てられます。この撮影はC-Probeでも可能ですが、大型カメラを搭載したり、ワイヤレス機器を搭載したりC-Probeでは載せられない機材搭載という使い道もたくさんありそうです。現在重量物を載せるための大型フロートも制作し、今後の使い道を探っているところです。
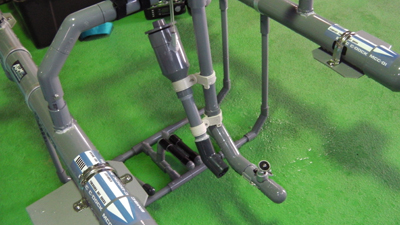
ラジコンメカは8chの2.4G受信機と40MHz受信機を搭載。状況により使い分けられます。
ESCスピードコントローラーは各モーターに1つづつ、2モーター2アンプとなっています。
バッテリーは7.2vパックを2個標準で搭載し、長時間撮影時には並列で4本搭載する事が可能です。
モーターコントロールを特殊な方法で制御し、操縦するだけなら送信機のスティック1本を使って右手の親指だけで操縦可能です。
DMDアンプなども試しましたが、この方法が撮影には一番向くと判断しています。まさに撮影用に特化した構成にしました。
空いた左手で他の制御機器を使える方が今後の発展に役に立ちます。

ということで完全分解丸洗いをするようになりました。やはり海というのは想像以上にモデルにとっては厳しい環境なのでしょう。C-DOCKも使用パーツはプラか塩ビ、そしてアルミかステンレスを使用しているので錆びる心配はあまりありませんが、それでも洗って潮を落とさないと、どんなトラブルが出るかわかりません。
やってみると色々なことがわかってきます。だから水中モデルは面白いんです。
さて、これからどこに行って撮影するか・・・
どんな風景に出会えるか、楽しみが色々増えました。
--2015年1月 STARFLEET YOKOSUKA DRY DOCKS--