


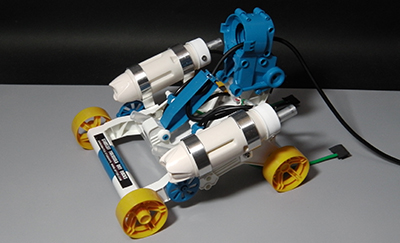
なぜタイヤが必要か・・・
水中なのでもともと滑るのでスキップパッドのようなモノでも良いですし、本来はそのまま浮きながら現場まで走行させても良いのですが、確実に目的地まで行くのには車輪がある方がまっすぐ進みます。このメカに舵は無いので左右のポンプのオンオフで方向を変えます。タイヤがあるので地上ではこんなことは出来ませんが、水中だからこそ出来るいい加減な方法というのもあって、余計な機構を付けなくてもどうにかなるという曖昧な操縦方法で成り立っています。
確実性が要求されるレスキューでそれはどうなのかという疑問もあるでしょうが、そもそも水底を走ること自体が地上と違ってタイヤがしっかりグリップするわけでも無いですし、わざわざにゴムを付けずにプラスチックだけの滑りまくるタイヤを付けているわけで、曖昧な操縦方法と、走行性能に助けられていると言うことです。それでもタイヤが回る方が抵抗がありませんから基本的にまっすぐ進むようになります。

ベースモデルは市販品
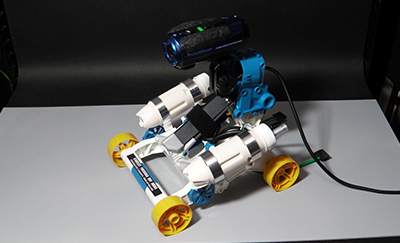
今回は塩ビ加工では無く手っ取り早く市販品で使えそうなモノを探して作りました。本体はエアエンジンカーという空気を圧縮してピストンを動かして走るというメカメカしいモノ。非常に面白そうなメカなのですが、残念ながらこのメカは使いません。
あとはコントロールはタミヤの4chリモコンボックス。ポンプは2つなので2chあれば良いのですが、リポバッテリーを搭載したいのでより大きいサイズの4CHリモコンボックスを使用しました。

紐付きは安心
救助メカは信頼性が命、いざというときに役に立ってもらわねばなりません。
救助に行って二重遭難というのは最悪です。しかも、他の艦を持って行くとなると、なるべく小型で軽くてかさばらないと言うことが望まれます。レスキューメカが大きいと運ぶのも大変です。しかも運用もローコストでありたいと思うので、バッテリー自体も他のラジコンと共有して余計な出費を抑えます。
安心と信頼性のポンプ。
どのパワーユニットを使うかという選択ですが、レスキューという性質上、スクリューがあると突起物(潜望鏡など)を絡んで壊してもいけないので、回転部分の露出が少ないポンプを選択しました。この工進製のポンプはいつも使っていて信頼性も高いのでうってつけです。ポンプ先端をやや下向きにして水流を斜め上に出しているのは水中走行時の浮き上がりを押さえるためで、なるべく安定走行してレスキュー現場に向かうためです。
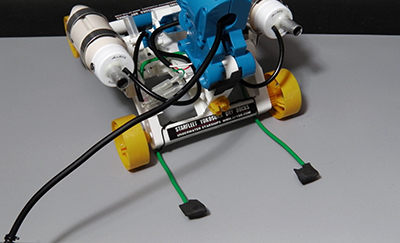
救助は引っかけるか押すという選択。
このメカの基本的なレスキュー方法は、着底している艦を超して回り込み、そのまま引くことで本体後ろ下に2本のバーが救助する艦を抱え込んでそのまま引き上げることです。現場まではポンプジェットで進んで、救助艦を抱え込んだら人力でケーブルを引き上げて回収する方法です。引っかかるまで何度でもトライできますし、相手の形状、位置によってアプローチする位置を考えて現場まで進むことで、効率よく回収することが出来るようになります。場所によってはそのまま押して回収可能場所まで押すという事も可能です。
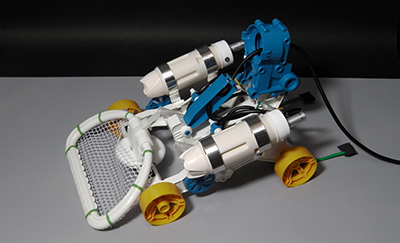
パーツ回収用の網もとりあえず用意。
これ自体で引き上げることは難しいのですが、細かなパーツが外れたときに、これですくってタモが届くところまで運ぶことが出来ます。もしかしたら役に立つかもというオプションパーツです。今のところパーツが外れるという事例はほとんど無いので、活躍することはないと思いますし活躍しない方が良いでしょう。
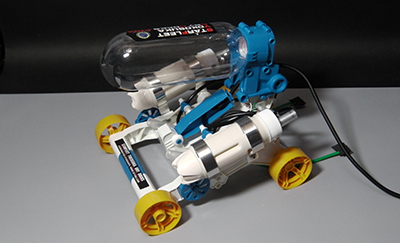
水上はフロートで。
エアエンジンの空気タンクを装着することで、水上走行も可能になります。ました。潜水艦というのは水上より水面下の方に本体があります。ですから押す場合には水上部分より水中部分が多い方が効率よく押すことが出来ます。よくボートで押しに行くと上を乗り越えてしまうと言うことがあるので、フロートタンクを付けるとフロートの下以下は水没しているのでちょうど良く押すことが出来ます。また、水底と同じように漂流艦の向こう側に回り込み、そのまま引き寄せることも可能になります。
カメラ台に。
小型の三脚を付けることによって、移動型のカメラ台となります。今では写せなかったアングルや位置へカメラを運んでそのままカメラ台となります。今まで固定カメラを設置できないような位置まで運べるので便利な移動カメラとして使用できそうです。

持ち運びやサイズも重要です。
レスキューメカが大きいと、運ぶのも大変になります。
目的は沈没した時の回収用ですから、使わないに越したことはありません。カメラ台として使うにしても他の荷物があるのにさらに大所帯となるのは避けたいところ。しかも使ったとはやはり水が残るので移動には水漏れしないケースが必要です。
こういうときには釣具屋さんで探すと良いケースがあります。今回も釣具屋さんで見つけました。軽くて防水、さらに底が二重になっていて編み目板でかさ上げされているのでそのまま収納しても水滴が下にたまり、帰ってから効率よく余分な水分を捨てることが出来ます。素材もビニルにワイヤで強度を出しているのでとても軽く、値段も手頃で良いと思います。
SFYDD水物外伝
宇宙戦艦ヤマトの救出訓練。
カメラを回す前にテストしていたときはものすごく順調に一回で上まで引き上げられたのですが、撮影を始めたとたん、なぜか手こずるように・・・。
本番に弱いのか、まだまだ改良余地があるのか・・・。
この日は予定したテストで回収出来なかったことが無いので、簡単なメカでも有効性があるのを確認しました。これで本来の目的は達したと判断して今後は実戦投入となります。この日も水上漂流のレスキュー依頼をこなしました。
基本的に問題なく回収出来ました。水上で小さい方のヤマトを2回、大きい方の2199ヤマトを2回、回収しましたがあっけなく回収。船体が突起物が多く引っかかりやすいという側面もありますが、潜水艦形状でも何回かやれば回収できるでしょう。
水底では1/500のヤマトを沈めて4回ほどレスキューしましたが、撮影前の最初のテストはパーフェクトで、一発でそのまま引き上げることまで出来ました。調子に乗って撮影を始めたら2回目からは一発で位置決めが決まらずに何度かやる羽目に。それでも回収出来なかったことは無いので、これで救助用の目的は達成できると実証できたことになります。
予想しないわけでは無かったのですが、一つ問題が起こりました。ケーブルの重さです。水底を走っていくとケーブルがどんどん伸びていきます。すると引きずるのが重くなって速力が落ちます。さらに後ろから引っ張られているので方向を変えるのが難しくなります。これは遠くで沈没しているときには大きな問題になります。有線ケーブルを使うときにはケーブル自体に所々浮力材を付けて中性浮力にして、本体の動きの自由度を保たねばなりませんが、そこまでしなくても大丈夫かも、と思ったのが大間違い。予備で持って行った浮力材を本体の側に2カ所付けることでかろうじて方向を変えることが出来るようになりましたが、基本的にはケーブルを引っ張らなければならないので重量がかかるのは避けられません。
ということで、ケーブルにも1mおきに浮力材を追加して中性浮力にすることになりました。推力にもっとパワーがあれば力任せに引いていくことも出来るとは思いますが、推力が強いと回り込むときに噴射で救助艦が動いてしまうと言うこともあるので、今以上にパワーアップをする必然性もありません。素直にケーブルを自由に動かせる方メリットが高いでしょう。
今回も色々とやって見なければわからない事があり、水中モデルは奥が深いなと痛感いたしました。
ともあれ、これがあれば冬の外プールでも役に立ちますから作ったこと自体有意義であったと思います。
ちなみに、タミヤのリモコンボックスですが、使っている内にレバーの動きが渋くなってきました。グリスをさそうと開けてみたら、スプリングがさびていました・・・。たしかに湿度が高い環境で使っているからなぁ。これは組みたてた時にスプリングにシリコングリスを塗りたくっておいた方が良さそうです。いよいよ動きが鈍くなってリモコンを交換するときには最初にやっておこうと思います。
ということでいきなり追加改良してみました。
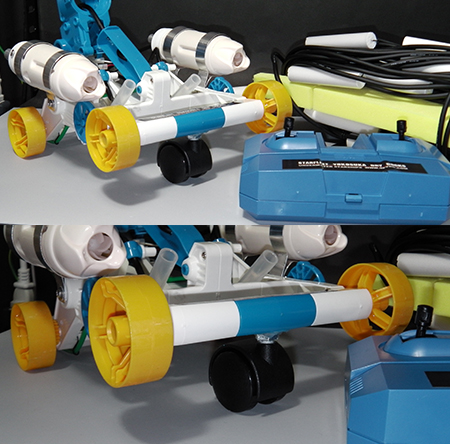
前輪の方向を変える機能が無いと無理矢理方向を変えるのでどうしてもスムーズに向きが変わりません。それでもどうにかなっているのですが、もう少し楽に動くように車輪の下にさらに自由に動くキャスターを付けてみました。前輪が浮いていますが、前輪があった方が着底した潜水艦を押すのに都合がいい場所なのでそのまま残すことにしました。
効果は抜群だ・・・
このキャスターの効果は抜群で小回りがきくようになりましたので
回収艦の周りで位置合わせがとてもやりやすくなりました。
すでに何回か実際にレスキュー出動しましたが、思惑通りうまく回収出来ています。とりあえず、このメカは目標達成ということで、完成とします。
--2016年10月 STARFLEET YOKOSUKA DRY DOCKS--