SUB DOCK-I 宇宙戦艦ヤマト Space Battleship YAMATO 2199 2014-9 就航
| |
1/350のヤマトが老朽化してきたので後継艦として1/500のヤマト2199のを製作を開始しました。しかし、ヤマト続いているなぁ・・・と我ながら思ってしまいます。
作る度にこれが最後、これが決定版と思いつつなんだか新しいギミックを思いついちゃうのです。ということで5隻目の宇宙戦艦ヤマトもまたギミック艦として製作しました。
今まで制作したヤマトは1/500が50cm、1/350が78cm、今度の2199ヤマトは約67cmとなり、3種類の大きさの船体を製作することになります。実は水中モデルに適した大きさとはどのくらいだろうという漠然とした考えがありましたが、この2199ヤマトの追加でその解答が出るかも知れません。
また、今回はスペックの向上だけでなく、とても地味な改良ですが、細かな水密ノウハウを多々組み込んでいます。見た目には現れない地味な手のかけ方ですが、そこにかなりの時間を費やしています。有り体に言えば、一切の妥協をせずに耐水処理をつめ込んだという感じです。ここまでやるかという小さなこだわりばかりなのですが、その一つ一つが耐久性を高めていくことをこれから確認と検証をしていきたいと思っています。
そのおかげでいくつかのパーツなどを何回作り直したことか・・・
なかなか進まない状況に精神的にかなり追い込まれ、何でここまでするかなぁと思ったりするのですが、終わってみてその選択が正しいかどうかはこれからわかってくると思います。
二度と作りたくない艦の筆頭は1/350のヤマトでしたが。今回はその上を行く難航した状況でしたので、作ってから気が付いた事などもあるのですが、改良やもう一隻の製作などはしばらく時間をかけないと精神的に無理でしょう。
|
|
| |
|
|
| |
宇宙戦艦ヤマト モデル情報
・ベースモデル:バンダイ 1/500 宇宙戦艦ヤマト2199
走行メカニズム
・推進方式 ポンプジェット(灯油ポンプ改造)
・舵取り方式 3D推力偏向ノズルシステム (3D-ACTIVE DIVE )
コントロールシステム
・メカボックス分散型ウエットハル形式
・8ch R/C システム
・サーボモーター(GWS PICO×5)
・アンプ Jetti 040
・受信機 コロナ40MHz 8Chシンセサイザー受信機
・バッテリー lipo7.4v2200バッテリー
・動力用モーター 7.2V用280 モーター
・Muratech製 マグネットスイッチ
・Muratech製 波動砲点灯回路 ←YDD特注品
・Muratech製 主砲砲点灯回路 ←YDD特注品
・Muratech製 ピッチコントローラー ←YDD特注品
・ピッチコントローラー たもつ模型
電飾
・波動砲用5mmLED×1 3mm青色LED×1
・主砲砲用3mmLED×9
・船体電飾用3mmLED×15
WFLY40MHZプロポ+フタバ40MHzシンセモジュール 2199ヤマト専用機
|
|
| |
|
|
|
| |
ラジコン宇宙戦(潜)艦ヤマト2199の秘密 SFYDD PV-39
撮影:Y_D_Dock
2015/08
内部の構造と動きを解説。
|
| |
|
| |
SFYDDのプラモ改造ラジコン宇宙戦艦ヤマト2199の超ギミック艦を説明します。外から見てもわからない内部と機構部分を公開しました。
実際の動きやフェールセーフ機構、プロポとの組み合わせでの動作状況などを分かりやすく解説しました。また、撮影の裏側に踏み込んで、撮影用の機構や撮影方法なども解説しました。
|
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 プロジェクションマッピングと水中走行(実写)Part--1
撮影:Y_D_Dock
2014/09
プロジェクションマッピングと実写のコラボ映像。
|
| |
|
| |
今回一番やりたかったことは陽電子衝撃砲、つまり主砲ショックカノンのコントロールでした。
砲塔の旋回は過去のヤマトで1番から3番主砲塔の連動で実現してきましたが、今回はそれを別々にコントロールし、尚かつ発射ギミック回路を追加しました。
さらに今回は映像としてプロジェクションマッピングを作ってみました。実写の動画とプロジェクションマッピングとのコラボレーション。本当に動くヤマトだからこそ出来る不思議な世界を楽しんでください。 |
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 プロジェクションマッピングと水中走行(実写)Part-2
撮影:Y_D_Dock
2015/01
プロジェクションマッピングと実写のコラボ映像。
|
| |
|
| |
今回は海編のPart-2。CGと実物と、そして実写の組み合わせです。
これからシリーズは続く予定ですので乞うご期待。
|
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 水中走行 Part-3 次元断層の迷宮再び。
撮影:Y_D_Dock
2015/01
新型撮影機C-Dockを使った水中撮影。
|
| |
|
| |
今回はプール編のPart-3。王道の水中走行映像です。水中走行撮影用に作った水中撮影フロートメカC-Dockにより走行シーンの撮影がやりやすくなりました。
|
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 水中走行 Part--4 次元断層の迷宮再び。其の2
撮影:Y_D_Dock
2015/05
新型撮影機C-Dockを使った水中撮影。
|
| |
|
| |
今回はプール編のPart-4。王道の水中走行映像です。水中走行撮影用に作った水中撮影フロートメカC-Dockにより走行シーンの撮影。
|
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 水中走行 part-5 次元断層の迷宮再び。其の3。
撮影:Y_D_Dock
2015/11
新型撮影機C-Dockを使った水中撮影風景。
|
| |
|
| |
今回はプール編のPart-5。水中走行映像を公開しました。水中走行撮影用に作った水中撮影フロートメカC-Dockにより走行シーンの撮影。
|
| |
|
|
| |
R/C 宇宙戦艦ヤマト2199 Making of Part-5 次元断層の迷宮再び。其の3。
撮影:Y_D_Dock
2015/11
新型撮影機C-Dockを使った水中撮影風景。
|
| |
|
| |
プール編のPart-5。水中走行映像の撮影風景です。水中走行撮影用に作った水中撮影フロートメカC-Dockにより走行シーンの撮影を公開しました。
|
| |
|

|
| |
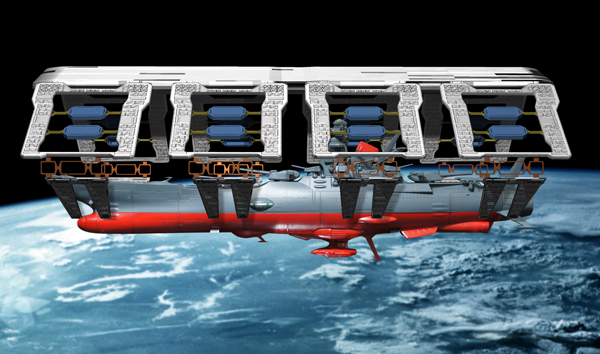
全長666mm SFYDDの5隻目のヤマト。
8ch専用プロポとの組み合わせです。
デカールはやめました、と言うより全部貼ったのですがなんか違和感があったのではがしました。これは私見なのですが、330mという宇宙船で船体のゲージってなに?・・・と考えたらなんかよくわからない。スタートレックの宇宙船はドッキングハッチやら、脱出ポッドにマーキングがあって、それは確かに意味があるのですけれども、主砲の旋回ゲージや喫水線にあるゲージの意味がわからないので排除しました。それにデカールの細い線でもこのクラスのサイズだと凄い太い繊なのでなおさら大味な雰囲気が。いやいや、宇宙船なんだからそんなアナログじゃ駄目なんじゃないかと。
各部のハッチのマーキングはありだとは思うのですが、それだけだとなんか美しくないしメカっぽくもない。このあたりは好みの問題で、デカールがあった方がリアルっぽいと思う人はデカールを貼るのが良いと思います。トップコートをしても水の中に長時間入れるとはがれる可能性もあるので私の場合は外しました。
ということで、あくまで私見と言うことで以前と同様デカール無しの船体にしました。
ウエザリングも基本的には付けたくないのですが、プラモのパッケージにあるようにごく薄い汚れた雰囲気は良いかも知れません。この汚しに関してはタミヤのウエザリングマスターでこすりつけただけなので水の中に入れると薄くなっていくと思いますし、それでよいかと思います。
実際5年以上も外プールなどで走行させていた1/350ヤマトも微妙な汚れしか付きませんでしたし、塗料の劣化なども起こりますからあえて汚す必要も無いと思っています。これが本当のウエザリングだと思います。
|
|
| |
陽電子衝撃砲は砲身の根本に3mmLEDを組み込んであります。合計9門、砲身をくりぬき1.8mmのアクリル棒を組み込みました。LEDだけで砲身が空洞だと砲身の先がうまく光りません。砲身の正面しか光が見えなくなるので追加で組み込みました。
回路的にマイナス側は共用できるのですが一つの砲塔で3つのLEDをバラバラに光らせるにはプラス側に3つのリード線が必要になります。つまり合計12本ものリード線を配船することになり、細いリード線でもかなりのスペースを必要とします。砲塔旋回時には若干の動きも必要になるのでその為のスペースも必要になり、他の電飾配線と共に船体内の空きスペースを埋めています。実際、この配線の処理に実質2週間以上悩みました。
メンテを考えると船体をかなりバラバラにする必要があり、船体上部下部への割りふりや、艦橋部への配線などもコネクタで分割できるようにしなければなりませんでした。
以前作ったUSSヴォイジャーのようにメカと船体をバラバラに出来るような構成が必要になってくるのですが、これだけの配線があるとそれを考えるのも一苦労。考え無しに組み込もうとすると配線が束になり太くなって組込めなくなってしまいます。合理的な統廃合とコネクタが必要になるのですが、コネクタはトラブルの元になるのでそこも考え、オリジナルの水中用コネクタを自作し、長期使用に耐えるように考慮しました。
これは新たな試みで、時間が経たないと予想通りの効果が得られるかはわかりません。つまりこれからの検証が必要です。このコネクタ製作も何度もやり直したりと時間と労力がかかっています。
砲身は順番に光るモードと、一斉に光る2モードの回路を使用しています。
送信機のスティックがトリガーになり、順射と斉射を使い分けられます。
砲塔自体が送信機のAUXチャンネルのダイアルに連動するので3つのダイヤルで操作します。これにより、砲塔一つづつ個別に動かすことが可能になりました。
発射トリガーはさすがに全部バラバラにするわけに行かず、すべての砲塔が同時に発射する要になっています。各砲門に一つのLEDが付いているので特徴的な五月雨式の砲門の上下ギミックは組み込めませんでした。もともと、このモデルにはその機能が省略されているのでない方がLEDは入れやすかったのですが、なんでこの艦だけギミックを外したのでしょう?あった方がディスプレイモデルとしても良かったような気がしますが。
砲塔がすべて個別に動くのはよいのですが、走行中に動かすのは中々大変な操作になります。
|
|
| |
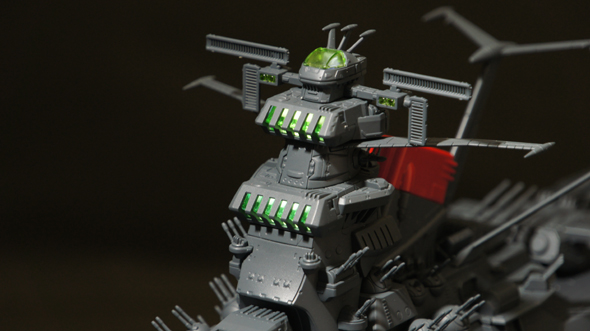
2199カラーの艦長室、第一第二艦橋。
個人的には以前のホワイトの方が好きなのですが、ここは設定に合わせました。
ちなみに、館長室はやや明るめのクリアグリーン、第一第二艦橋は同じクリアグリーンです。
ちょっと色を変えてみましたが、あんまり意味がなかったかも。
第二艦橋はLED2個、第一艦橋、艦長室に各LED一つ、艦長室はキットの光を採り回すクリアパーツを使用して下から光を当てているのであまりぎらぎらしません。
第一第二艦橋、そして艦側展望室はスクリーンのパーツの内側に0.3mmの白色プラ板を貼ってそこに光を当ててなるべく均等に光るようにしています。以前から使っているテクですが、なるべく均一に光った方が美しいと思います。
|

|
| |
波動砲に関してはもはや標準装備です。
今回光らすのに苦労しました。砲口にクリアパーツがあるのですが、これが微妙なレンズになっていて以前のようにLEDを離したところから光らせると全然光ってくれません。
これにはしばし悩みました。LEDが暗いのか・・・・と思い、数を増やしてみたり。
ですが状況は改善しません。よく見るとこの砲口のクリアパーツは微妙にレンズになっていてクリアパーツ直後にLEDを置くと波動砲の砲口に光が広がり、離れると光が広がらないので暗くなると言う事でした。
そこで仕方なくLEDを5mmにしてレンズ直後に配置するようにしました。しかも5mmLEDを使ってもこのクリアパーツはぎらっと光ってくれません。
このあたりは以前のようにLEDを離しても光るようにしてほしかったです。というより、これも計算しての設計ということならそれはそれで凄い技術力ではあると思いますが・・・。
|

|
| |
SFYDDヤマトの定番、3Dノズル。ノズルの動きは前作と同じです。今回も波動エンジンと補助エンジンにLEDを組み込み波動エンジンには3つのLEDを使用しなるべく均等に光るようにしています。色は白色LEDに赤の拡散キャップをかぶせて色を出しているので、拡散キャップを変えれば白やグリーンやなどにも変えることが出来ます。本当はこの部分もプロポ制御でモーター回転数連動にしたかったのですが、すでに回路を入れるメカボックスのスペースが無く、その回路を組み込むともう一度設計を変えざるを得ないので、今回は断念しました。
これはこれで心残りなので。前のサーボケースに若干のスペースに余裕があるので入れるとするともうそこしかないのですが、そうなるとまたLED用の配線LED5個分が必要になりさらにその取り回しも大変なため、暫く時間をおいてから考えようと思います。
艦橋電飾にLED4つ、上部ハルの展望室に各2個、後部離着艦管制室に2個、船体の電飾だけで8個のLEDリード線の取り回しがあり、さらに波動砲、ショックカノン、エンジン関係で
16個のLED配線。さらにサーボ用5個などもあり、とにかく配線をどうまとめるかが最大の試練でした。
すでにもう頭の中ぱんぱんになってしまっているのでこれは時間をあけて再考します。
|

|
| |
今まで単色で上部船体を塗っていましたが、砲塔の下の甲板は若干色を変えています。設定色だと甲板だけ妙に色が濃くなるので、アニメにあるように微妙に色替えしてあります。私的にはこの方がしっくりきます。この色替えは作業用のノンスリップ塗装とかでしょうか・・・。全体は2199カラーではなく、オリジナルで調色しています。1/350のヤマトで使用していたカラーにやや青みを足して凄みを利かせたほんの少しブルーっぽいダークグレーになっています。
ヤマトは細かな部品が多いデリケートな艦です。特に飛び出ているところは破損が必ず起こります。今まではなるべく頑丈に補強したりしてきましたが、今回は細かなパーツはほぼパチ組のままです。今までのヤマトを扱ってきた5年以上の経験からたどり着いた結論、補強しようがしまいが壊れるときは壊れると言うことです。それで、製作にプラモ2セット用意しています。細かなパーツはライナー毎塗装して予備として、特に破損率の高い物は型どりしてプラリペアで複製しました。破損したらそのまますぐ交換、と言うのがストレスがない使用方法です。ヤマトに関してはあえて簡単に交換できるようにするのが良いと思います。
とはいえ、取り扱いは慎重にしなければなりません。大切に使うことで長く遊べる船体となります。
|
|
| |
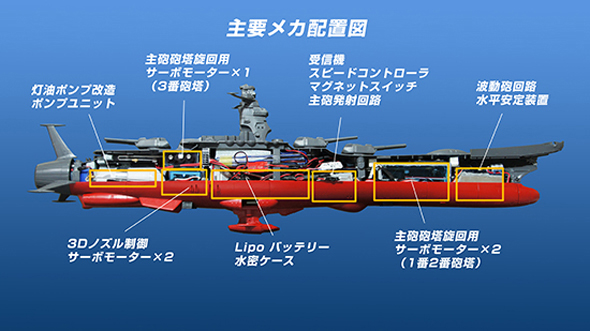
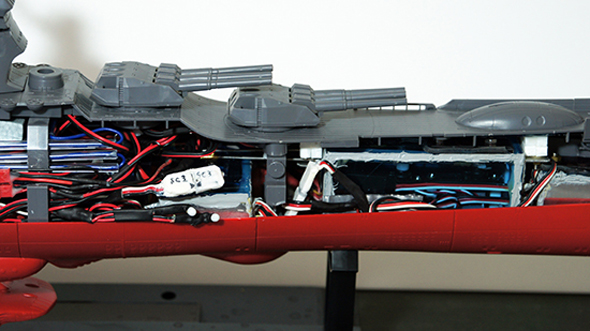
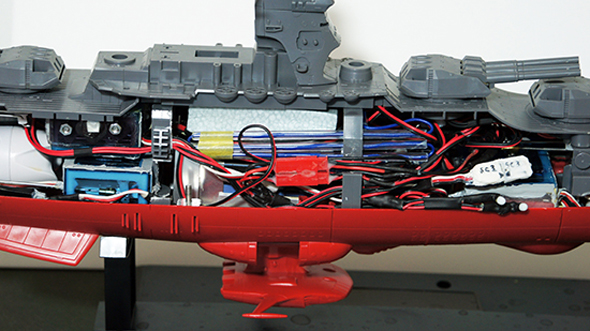
船体内には艦首方向から順に、メカボックス1(波動砲回路/ピッチコントローラボックス)メカボックス2(主砲1番2番旋回用サーボボックス)、メカボックス3(受信機、アンプ、マグネットスイッチ、主砲発射回路)メカボックス4(バッテリーボックス)、メカボックス5(3番砲塔旋回用サーボボックス)、メカボックス6(3Dノズル操作用サーボ2個)、灯油ポンプ,3Dノズルを配置。
このヤマトは8chを使用しています。
|
|
| |
●艦首波動砲用制御/水平安定回路ボックス
艦首の一番先に位置するボックスが波動砲の発射回路と2種類のピッチコントローラー回路が入っているボックスです。
この水密ボックスの上のアルミパイプに波動砲用のLEDが入っています。写真では外していますが砲口まではさらにアルミパイプで延長する形になります。組み込むときにLEDをその延長パイプの先まで挿入し組み込みます。そうしないとこの波動砲の砲口のレンズはきれいに光ってくれません。
このボックスの上部にはネジ止めされたハッチがあり、ハッチを開けると2種類のピッチコントローラー(水平安定器)の切り替えスイッチがあります。2種類というのは文字通り2個の別々の回路基板が入って言うと言うことです。
一つ目はピッチコントロール優先式の回路です。
これはプロポ操作のある無しにかかわらず、常にピッチコントロールを優先させます。この回路はカメラを搭載させたりするときに使用します。
艦首が下がったときにラダーを上げようとして動きますがプロポで下げ舵にしても操作量はピッチコントローラーで相殺され、急激な動きにならないようになっています。今までのように一人撮影で船体と撮影ボートの二隻を操縦すると操作があらくなりますが、このピッチコンのおかげで動きがズムーズになり水底への接触などが起きにくくなります。これは撮影用です。
2つめのピッチコントローラーはプロポのスティック操作優先式です。
自由走行では急速潜行や急速浮上などアクロバティックな操縦もしたくなります。撮影時には有効なピッチコンでもこういったときには強制的に動きを制約してしまうので機能をキャンセルしたくなります。スティックがニュートラル位置でピッチコントローラーが作動し、艦の傾斜を感知すると自動的に水平に戻そうとします。スティック操作中はスティック操作位置に準じます。色々考えて相談したのですが両方の特性を反映するのは難しいと言うことなので、それならばと2つのピッチコントローラーを搭載してしまいました。
|
|
| |
●今度の主砲は3サーボ
今まで製作してきた1/500と1/350のヤマトでは、主砲ショックカノンは一つのサーボで3つの砲塔をリンクして旋回させていました。3つの砲塔すべて同時に動く反面、個別に別々の方向に動かす事が出来ませんでした。そこで今回は多チャンネルをフルに活用し一つの砲塔に1つのサーボを使用して、プロポのダイヤルに連動させて動かすようにしました。
第一と第二砲塔用のサーボは一つの水密ボックスに組み込み、砲塔へはリンクロッドでつなぎ動かしています。現在防水サーボというのも販売されてはいますが、自作でサーボの水密化を行った経験上サーボを水密化するより水密ケースでがっちり水密する方が長期利用では有利だろうと判断しました。防水サーボを使えば省スペースになるのはわかるのですが、現在の防水サーボは水中での使用は考えられていないので選択肢から外したという面もあります。
さらに砲身毎にLEDを使用して発光させられるようにしています。また、ショックカノンの発射回路は2モードになっていて、一斉射撃と端から順番に発射する順射を使い分ける事が出来ます。残念ながら3つの砲塔を個別発射は出来ません。そうするとあと2ch必要になりますし、走行中に発射するのも操作が煩雑になりすぎて無理でしょう。
このモデルの砲身は以前のモデルのように五月雨式に動くカムのギミックがありません。これはとても残念なのですが、今回は各砲身1門に一個LEDを組み込んでいて、さらに個々に抵抗も追加しているので、カムがあっても外さなければ入らないと思うのでそれはあきらめています。この一つのLEDに一個抵抗を追加する方式はとてもめんどくさいのですが、回路の元で抵抗値を計算して一つの抵抗ですますと、LEDのばらつきで明るさがそろわないことがあります。それであえて一つに一つ抵抗を付けるという手の込んだ事をしています。
当然ですがこの3つの砲塔には3つのサーボと9個のLED配線が必要になります。この配線の取り回しが今回の最大の難問でした。配線を細くしすぎると切れやすくなり、太すぎると配線だけで場所を取ってしまいます。なるべく回線を共有して線を少なくしましたが、それでもかなりの量になります。さらに船体電飾もありますので配線だらけという状態になっています。
配線は全部直結してしまうとメンテナンスでばらせなくなるので、ところどころコネクタを使用するのですが、このコネクタ自体も結構スペースを必要とします。これをまとめるのは今まで以上に大変な作業でした。
|
|
| |
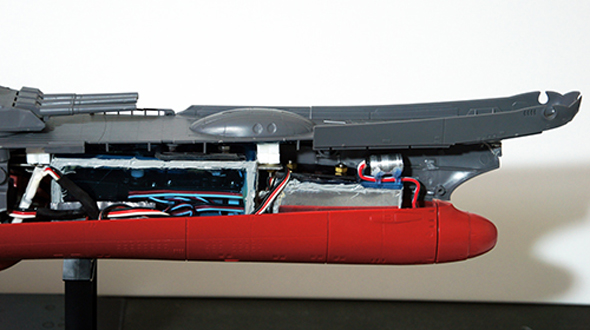
●ミニマムサイズのメインボックス
メカのメインボックスには、8ch受信機、スピードコントローラー、マグネットスイッチ回路、ショックカノン発光回路をコンパクトにまとめました・・・というより内部スペースに余裕がないので無理矢理詰め込みました。第一第二砲塔の中間の真下がメインボックス。砲塔の下には旋回用のリンクロッドがあるので、そのリンクロッドにかからないサイズにしたらめちゃぎりぎりになりました。幸いなことに受信機がシンセタイプなので、ケース上部は受信機のセット用に小さなハッチを付けるだけでよく、バンド変更はハッチを開けてピンを刺すだけという簡単な方法で出来るようになりました。
この写真では船体の右の外板を外していますが、こちらサイドは配線があるためごちゃごちゃしています。これは製作途中でわかりやすく内部構造を見れるようにしているだけで完成時は接着してしまいます。
メンテナンス用には船体を上下分割で明けられるようにしていますが、通常は艦橋の甲板部を外してバッテリーケースを引き出してバッテリー交換をするので船体を開ける必要はありません。
各部の水密ノウハウは今までの経験上最良と思われる技術を投入しているので、延べ10時間程度の走行毎か半年に一度のリンクロッドの分解メンテ(シリコングリス塗布)をすれば問題ないでしょう。
船体中央部の下部にバッテリーケースを搭載しています。今回は容量と大きさのバランスを考え、リポバッテリーを選択しました。リポバッテリーに関しては取り扱いに注意がいるのでSFYDDとしても推奨はしていませんが、使い方と特性の知識があれば使用しても良いかと思います。というよりも小型のバッテリーはほとんどリポにシフトしてきているので、昨今では使わざるを得なくもなってきています。
絶対遵守事項として基本放電量より大量の放電をさせない使い方をする、充電時には必ずリポ対応の充電器を使用して尚かつ目の届くところで充電する。リポチェッカーなどでセル間の電圧バランスと電池残量を確認しながら使用する。などなど、小型のリポバッテリーは使用方法を守れば比較的安全に利用できます。ですが、移動時や保管時にはリポセーフケースなどに入れるのは必須です。
テスト走行をしてみたところ、通常出力で使用して約30分程度の走行で残量30%程度となり、走行直後でもほとんど温度変化がないので安全に使用できていると判断しています。
|
|
| |
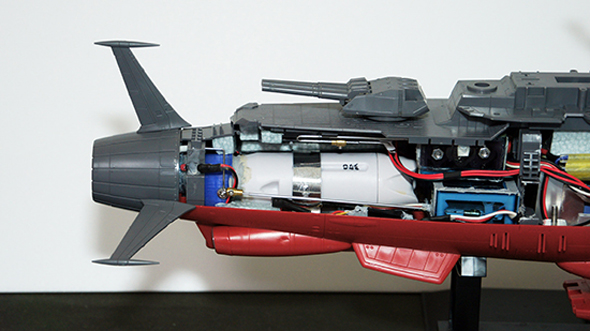
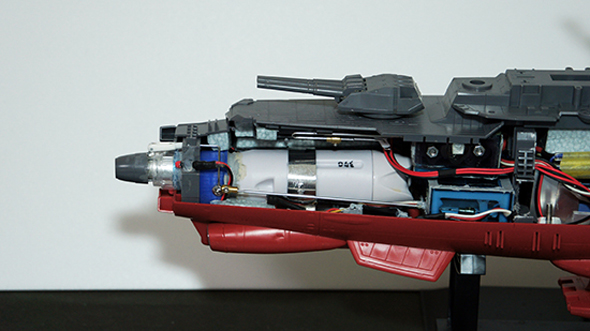
●第三砲塔旋回用サーボと3Dノズル制御用サーボ。
3Dノズル制御用のサーボは水密ボックスにいれてポンプの前に配置。リンクロッドで3Dノズルまでリンケージしています。このサーボボックスの上に砲塔旋回用のサーボケースがあり二段重ねになっています。第三砲塔サーボはは上の船体に固定され、3Dノズル用サーボは下の船体に固定されるので分割されています。こうしないとメンテナンス時に船体分離が出来なくなります。この船は主砲用サーボケースは上部ハルの方に固定されています。
|
|
| |
船体最後尾には2軸式3Dノズルを配置し、サーボケースからのリンクロッドで稼働しています。灯油ポンプはいつものように交換式になっていて、3つのタイプのモーターのポンプを使用可能です。
YDDの灯油改造ポンプは現在3種類あります。一つ目は旧1/500ヤマトに使っているノーマルモーターのもの。二つ目はVOYAGERに使っている7.2V用パワーモーター、そして三つ目はバスポンプより強力な推力を出すハイパワーモータータイプの物。
今回は2番目と3番目を用意。初回テスト走行ではバッテリーの駆動時間やパワーを確認するためにハイパワーモーターを使用しましたが、少々パワーをもてあましました。これはカメラを搭載して抵抗が大きくなったときに使用する方がよいでしょう。通常は7.2V用パワーモーターを使用することにします。その方が走行時間も増えバッテリーへの負荷も下がるはずです。
|

|
| |
●ヤマト専用にした8chプロポ
今回使用したのはWFLY社のWFT08で、フタバの40MHzのモジュールを組み込んで使用しています。水中で使用出来るのは27MHzか40MHzだけなのですが、このプロポで使える40MHz用のフタバのモジュールもすでに生産終了してメーカー在庫もない状態です。プロポ自体はそうそう壊れる物でもないのですが、40MHzプロポも貴重品になってきました。
機能的に8chをフルに使用しています。走行系には、スピードコントローラー、3Dノズル制御用サーボ2個、ギミック系には波動砲回路、主砲発射回路、砲塔旋回用サーボ3個の合計8chとなっています。
わかりやすくまとめると以下のようになります。
1ch 主砲発射 A/Bパターン レバー左右にAB振り分け
2ch 3Dノズルエレベータ/ピッチコントローラーA/B(スイッチ切り替え)
3ch スピードコントローラー
4ch 3Dノズルラダー
5ch 波動砲発射 トグルアップ(発射準備点滅)トグルダウン(発射~終息)
6ch 第一主砲旋回 (ダイアル操作)
7ch 第二主砲旋回 (ダイアル操作)
8ch 第三主砲旋回 (ダイアル操作)
走行用の水辺安定装置のピッチコントローラーは切り替え式で2種類搭載。
コントロールレバーは左側が3Dノズル制御、右側がスロットルとショックカノン発射トリガーとなっています。ショックカノン発射は右のスロットルレバーを使用して、右に倒すと砲身が順番に発光する順射モード、左に倒すと全砲門一斉射撃モードになっています。
|

|
| |
専用操作盤。ダイアルつまみ左から、第一砲塔、第二砲塔、第三砲塔、トグルスイッチが波動砲発射トリガーとしました。ダイヤルつまみに連動して各砲塔が動くようにしてあります。このレイアウトは元々のプロポのデザインですが、ちょうど良く感覚的にわかりやすくなっているのであえて専用機にしてしまいました。パネルの文字印刷が小さくて見えにくいのですが、陽電子衝撃砲、次元波動爆縮放射器となっています。
|
|
| |
YDDock YAMATO 2199 走行テスト&ショックカノン水中乱れ打ち
撮影:Y_D_Dock
2014/08
メカテストなので船体の装飾類は無し。
メカボックスの対水、耐圧テストと各ギミックの水中動作テストです。
|
| |
|
| |
今回のテストでは各水密ボックスの耐圧漏水試験と電波の到達実験の2つの要素を試しました。メカボックスの作り込みは今までのノウハウと、気の遠くなる細かな手のかけ方をしているので思ったとおり問題なく各部漏水はありませんでした。電波の到達に関してはアンテナ線の設置方法を従来の船体の内周を這わず方法を変えて、パルスレーザーの位置に平行に短く並べるという方法を試しました。これは効果的なようで、以前の1/350や1/500より安定している印象がありました。これに関しては継続して確認していきます。 |
| |
|

|
| |
以前の1/500と2199の1/500。大きさが一回り違います。色がかなり違いますが、小さな艦を暗くするとより小さく見えるのと、暗くするとディティールが見にくくなるので小さな艦はあまり暗く仕上げないことにしています。
この二隻はプロポーション的にはほとんど同じデザインと言っても良いでしょう。1/350が艦首が幅広で船のイメージが強かっただけに、こちらの方が宇宙船ぽくて好きです。それに1/350の艦首のそりはかなり水の抵抗になりましたから、このデザインの方が都合が良いというのもあります。本当はあと10Cm大きいとギミックがさらに入れやすかったのですけれども、一般家庭に置くにはこれでも大きいのかも知れません。ですが、どうせ大きいならあと10cm、前作1/350ヤマト同様80cm近い大きさにして欲しかったです。贅沢な悩みですけれど。(´Д`;)
ちなみに1/350ヤマトも並べたかったのですが、ちょうどメンテでばらしていたのでそれはまた次回に。退役したとはいえ、1/350ヤマトも稼働可能状態にしてあります。このヤマトにも色々思い出がありますからきちんと整備して保存するつもりです。
さて、無事就航した2199ヤマトですが、現在カメラ搭載用のアタッチメントを製作しています。
概要はTech noteにて公開中です。水中撮影メカ C−Dockも公開中。
2017年5月 YAMATO2199 Second Editionが就航しました。
当HPの新コンテンツ、sfydd-pfaコーナーにて情報公開開始。この2199の進化バージョンとなっています。
|